Depth
In this chapter, you can learn about stereo calibration, sparse point cloud, and dense disparity map computation.
- Bottlenose Stereo Viewer: a utility application that can stream images and disparity maps from a Bottlenose camera
- Stereo Calibration: explains how to properly calibration a Bottlenose camera
- Calibration Parameters: provides details on how to upload calibration parameters onto a Bottlenose camera.
- Sparse Stereo: shows how a Bottlenose stereo camera can be used to generate sparse triangulated 3D data.
- Dense Stereo: explains how to generate a dense disparity map with a Bottlenose stereo camera.
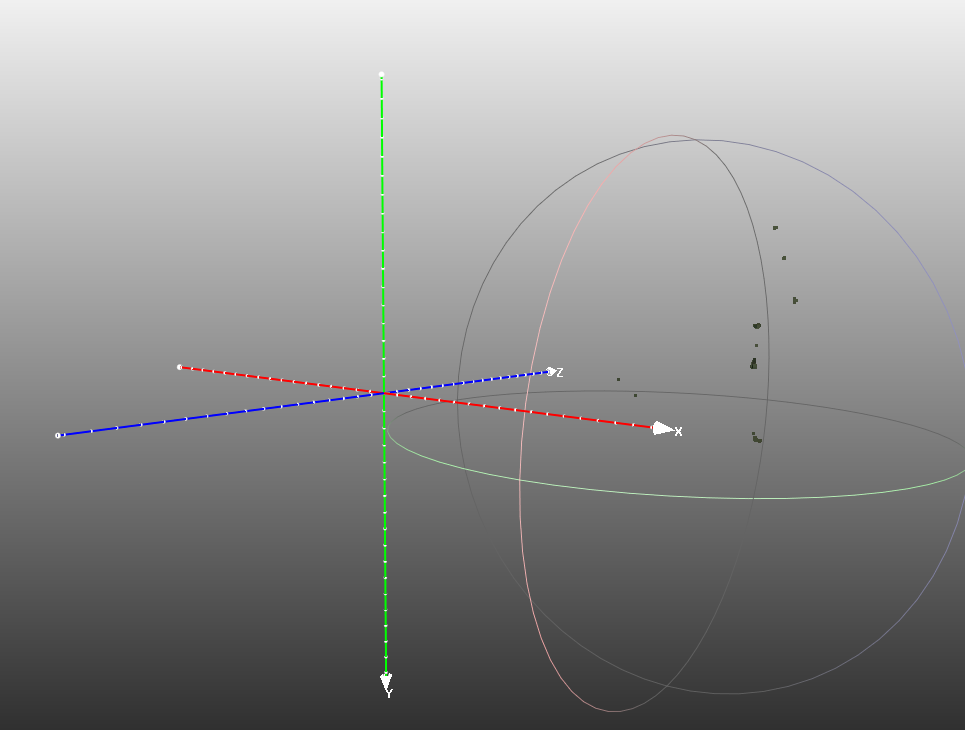
Axes for the camera are defined in the traditional way, with left camera as the origin, and Z-axis pointing forward:
Updated 8 months ago
Did this page help you?